宇宙では今、宇宙ステーションに乗船した若田光一船長の活躍が期待されていますね。
同時に、世界初のロボット宇宙飛行士「キロボ」も今回乗船し、宇宙での人とロボットのコミニケーションの観点から活躍が期待されているようです。
宇宙にロボットといえば、なんだかSFマンガで育った私からすると、
いよいよそういう時代の到来か・・
と思ってしまいます。
ロボットのクオリティはいつの間にか高くなっているようです。
将来子供の世代になると、どのようになっていることでしょう。
親子で楽しむ学習ロボット
家庭で楽しめるロボットも今では気軽になってきました。
子供がロボット研究室でプログラミングに触れるようになってから
うちでも楽しめるようにとプログラミングロボットを購入しました。
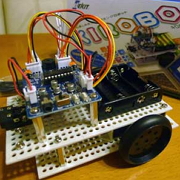
名前は宇宙に行ったキロボと同じKIROBO。

「エレキット」から出ているKIROBOは電子工作キットで、
タッチセンサー、赤外線センサーが搭載されプログラムにより前後左右、回転などが行えるタイヤの付いた走行ロボットです。
プログラム次第では複雑な走行も行えます。
これと同じようなロボットを使ったサッカーの国際試合も行われています。
赤外線のボールを追いかけ、ゴールへシュート。
相手の攻撃をかわしたり妨害したり、観ていても面白いです。
小学生が大学生を負かすこともあるようです。
世界大会に出場する小学生もいるようですよ。
この試合、FIFA公認なんです。
FIFA サッカー日本代表ロボット部門、ということです。
なかなか夢がありますね。
そんなKIROBOも先日ようやく子どもと一緒に組み立てを終えて、サンプルプログラムを走らせることに成功しました。
息子には、
「火星探査機も救助ロボットも基本は同じだよ」 と話しながら、
どんな動きをさせるか一緒に考えています。
KIROBOのプログラム
用意されているサンプルプログラムは、ロボットの特性に合わせて段階的にテストできるようになっています。
まずは、移動とタッチセンサーだけでいろいろな動きを試してみることにしました。
Step-1移動
- 5秒間前進して、ブレーキを使って停止するプログラム。
- 20秒間前進して、ブレーキを使って停止するプログラム 。
- 前進した後、反転して(方向を変えて)戻ってくるプログラム。
これを応用すると、廊下をまっすぐ進んで部屋の中をグルっと回って戻ってくるようなことが出来ます。
精密な物ではないので真っ直ぐ進むなんてことはできません。
その都度修正する必要も出てきますが、それも計算に入れてプログラムするのが面白いところです。
Step-2 タッチセンサーを使う
- タッチスイッチが押されると1秒間バック、スイッチが何も押されていないときは前進し続けるプログラム。
- タッチ(1)が押されたときは右回転し、タッチ(2)が押されたときはブザーを鳴らす。それ以外のときは、何も動かないプログラム。
- タッチ(1)がオンすると後退、タッチ(2)がオンすると前進、両方がオンするとブザーを鳴らしてモーターを止めるプログラム。
これらを応用すると、
タッチ(1)が押されると1秒バック、半回転して前進。
といった動きが作れるようになります。
つまり、部屋の中で壁にぶつかると回転して次の障害物まで前進。
またぶつかると回転して走行、といった子供が見てもとても楽しい状況が作れるようになります。
プログラムはこんな感じです。

タッチセンサーは前に一つ後ろに一つが標準でセットされているのですが、考えてみれば後ろは要りませんね。
前方の左右にある方が色々楽しめるかもしれません。